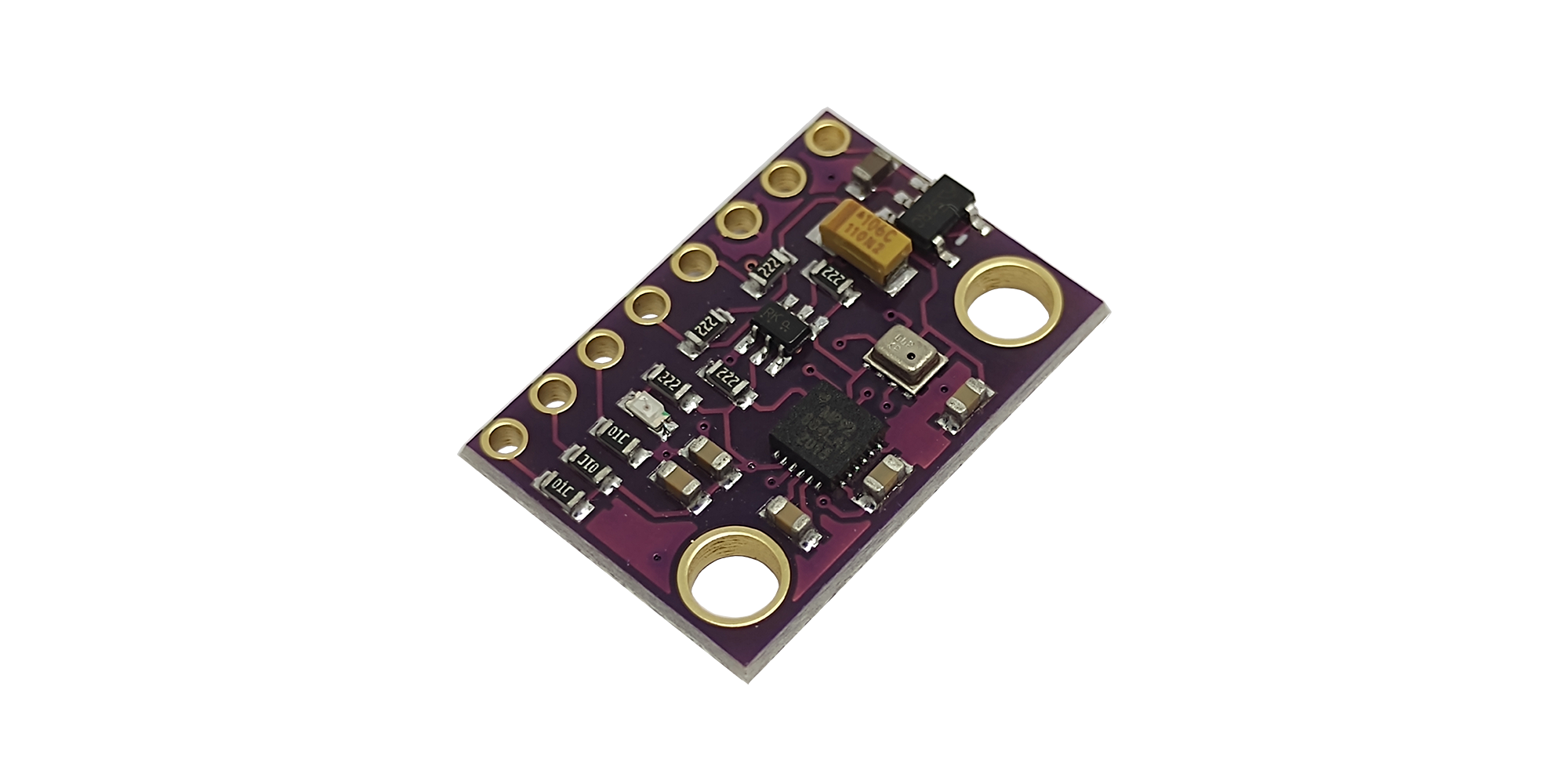
MPU9250-BMP280 consiste em um módulo GY-91 altamente versátil. É equipado com os sensores Invensense MPU9250 e Bosch BMP280 em uma única placa, fornecendo 10 graus de liberdade (10DOF) no total.
O MPU9250 é um módulo de dispositivo de rastreamento de movimento de 9 eixos multi-chip que consiste em um giroscópio de 3 eixos, um acelerômetro de 3 eixos e um magnetômetro de 3 eixos AK8963 além de um sensor de temperatura integrado.
O BMP280 é um sensor de pressão barométrica absoluta especialmente projetado para aplicações móveis. Também é equipado com seu próprio sensor de temperatura assim como o que acompanha o MPU9250.
Funcionamento
MPU9250 e BMP280 compartilham o mesmo barramento de comunicação I2C. A integração com o Arduino no nível do software é muito simples, pois existem bibliotecas prontas para serem usadas. No nível de hardware, o módulo inclui um regulador de 3,3 V na placa, bem como resistores pull-up no barramento I2C.
Como sucessor do amplamente adotado BMP180, o BMP280 oferece alto desempenho em todas as aplicações que requerem medição precisa de pressão. O BMP280 opera com ruído mais baixo, suporta novos modos de filtro, tem a vantagem sobre o BMP180 de ser 63% menor e 13% mais veloz. A comunicação do BMP280 com o dispositivo é realizada usando I2C a 400kHz compartilhada com MPU9250 ou SPI a 1MHz.
Especificações Técnicas MPU9250-BMP280
-
- Módulo GY-91: MPU9250 + BMP280
- Tensão de funcionamento: 3V / 3.3V ~ 5V DC
- Interface de comunicação: I2C e SPI
- Comunicação compatível com 3.3V ou 5V
Sensor: MPU9250
-
- Faixa do acelerômetro: ± 2g, ± 4g, ± 8g, ± 16g
- Gama do giroscópio: ± 250Grad / seg, ± 500Grad / Sec, ± 1000Grad / seg, ± 2000Grad / Sec
- Faixa do magnetômetro: ± 4800µT
- Conversor AD: 16 bits (saída digital)
- Graus de liberdade (DOF): 9
Sensor: BMP280
-
- Faixa de Pressão: 300 a 1100 hPa
- Resolução: 0,16 Pa
- Precisão absoluta: 1 hPa
- Medição de temperatura incluída
- Resolução de temperatura: 0,01 °C
- Precisão Temperatura: 1 °C
- Frequência de amostragem: 157 Hz (máx.)
- Regulador de tensão integrado na placa
- Consumo de energia ultrabaixo
- Completamente calibrado
- Dimensões: 2,5 cm x 1,4 cm x 0,3 cm
Pinagem
-
- VIN: tensão de alimentação 5V
- 3V3: saída de 3,3V
- GND: terra 0V
- SCL: Clock I2C / Clock SPI
- SDA: entrada de dados I2C Data / SPI
- SDO / SAO: Saída de dados SPI / I2C Pino de configuração do endereço escravo
- NCS: Chip Select para o modo SPI apenas para MPU-9250
- CSB: Chip Select para BMP280
Simples projeto
A obtenção de dados do sensor será mostrado de forma simples e direta.
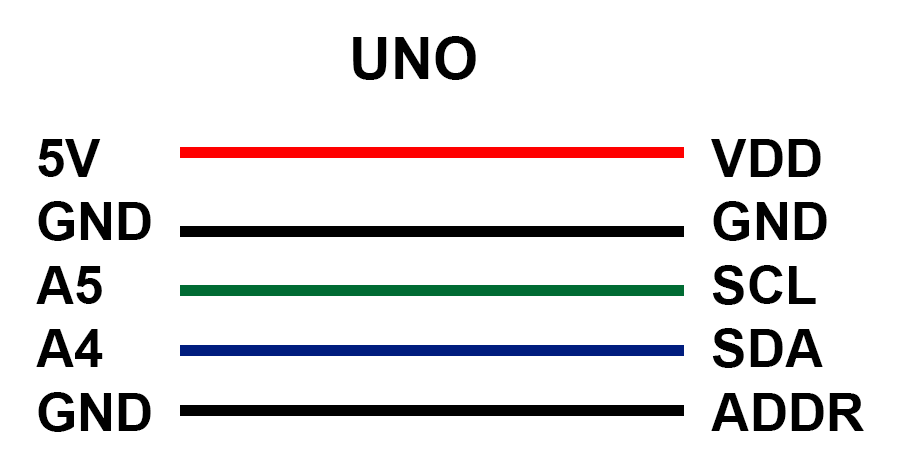
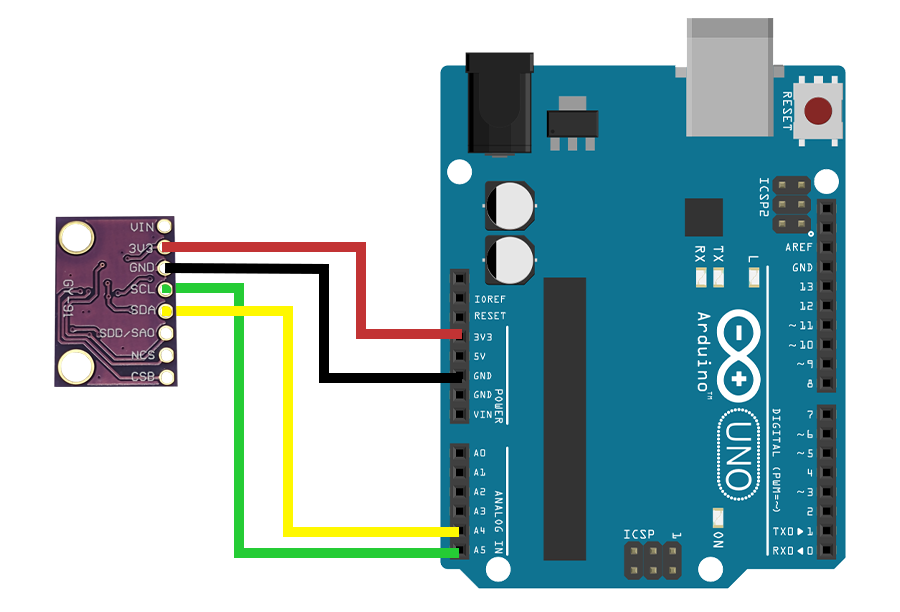
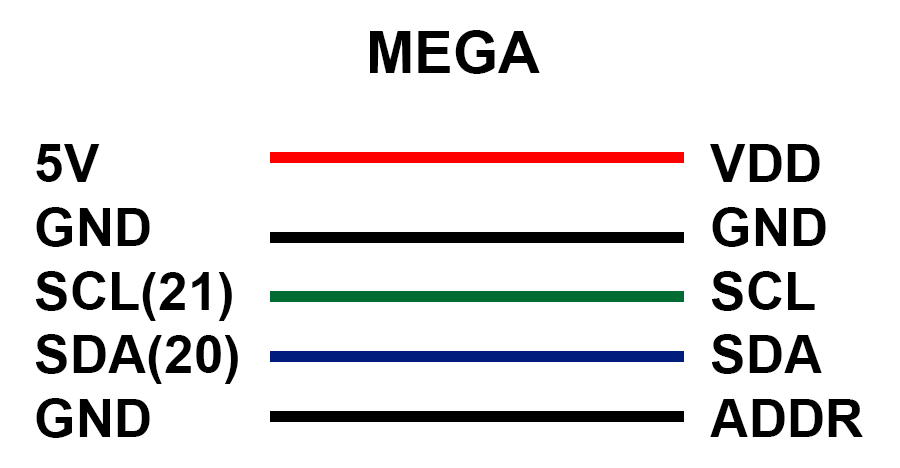
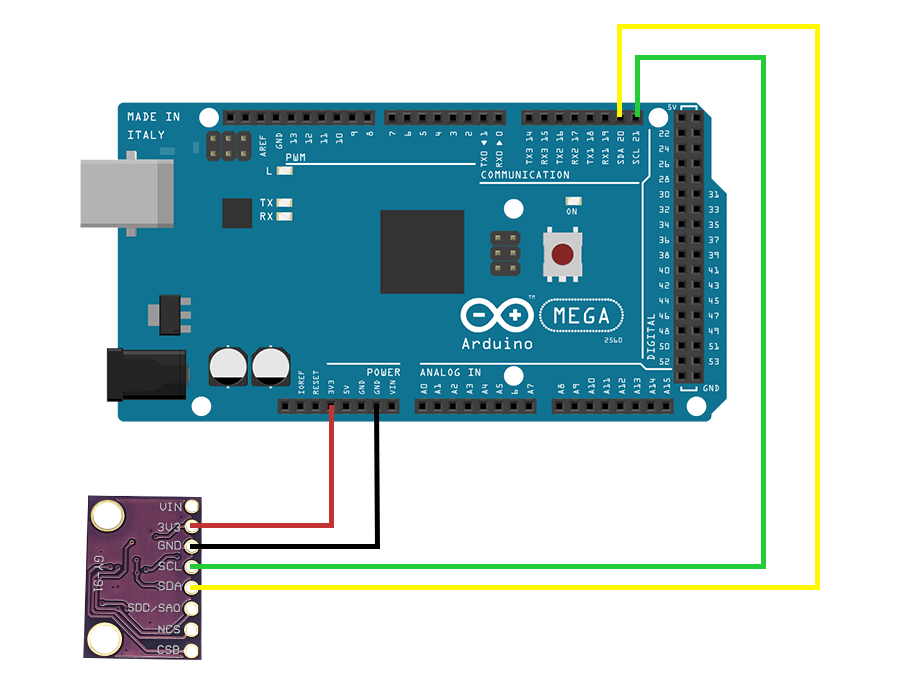
Conexão do Sensor MPU9250-BMP280 com Arduino
A conexão com o Arduino é muito simples, siga conforme o esquema abaixo:
Código
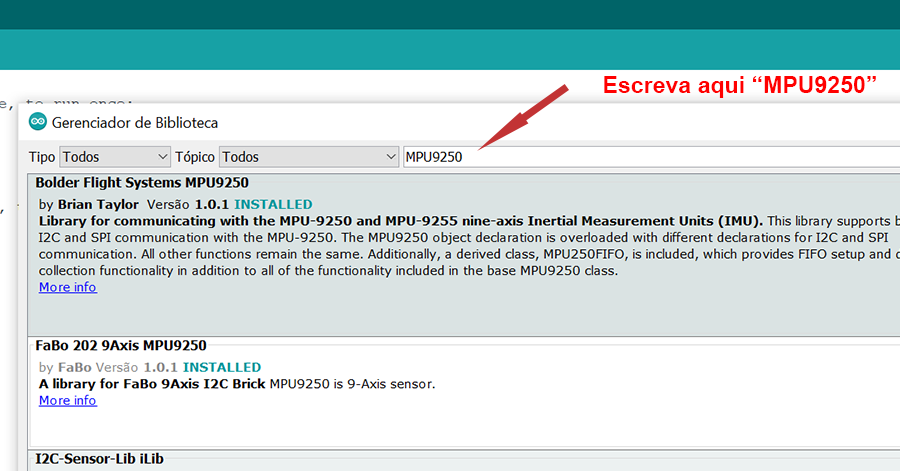
Primeiramente, devemos incluir as bibliotecas MPU9250 e BMP280. Em seguida, baixe o código para fazermos o experimento com o sensor.
OBS: Talvez seja necessário atualizar as bibliotecas. Então, sugiro atualizar todas pelo Gerenciador de Bibliotecas.

Calibração do MPU9250-BMP280
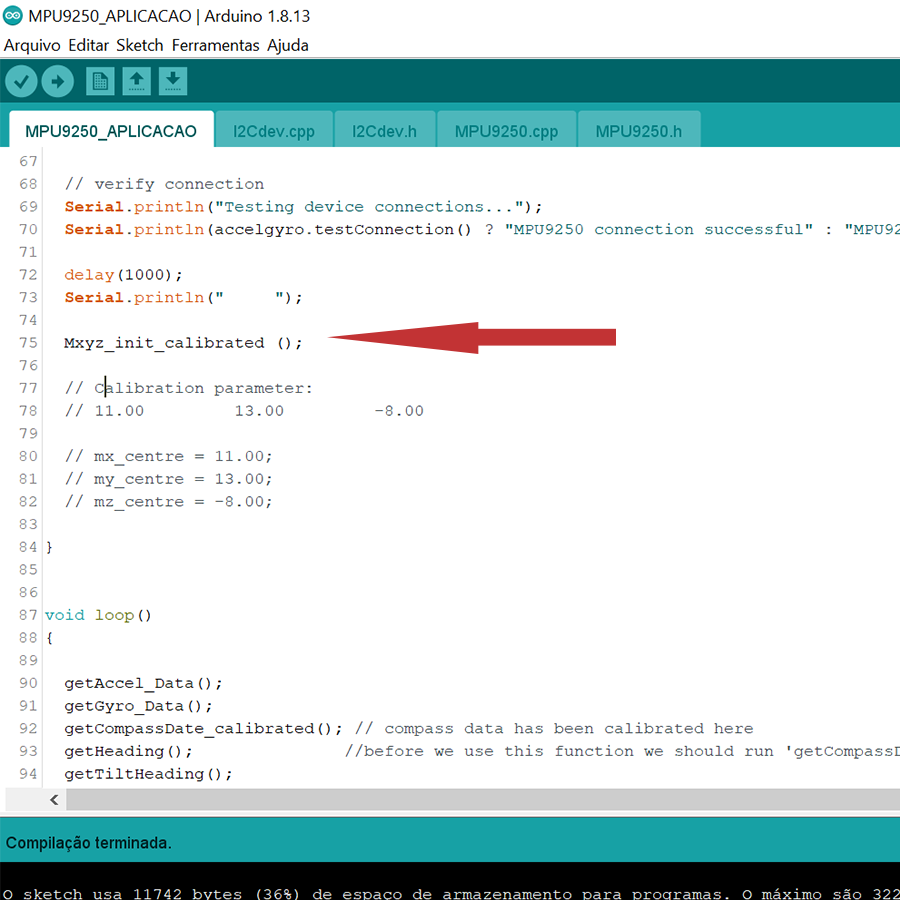
Feita a atualização das bibliotecas, inicialmente devemos obter os parâmetros de calibração para ser usado definitivamente no sensor.
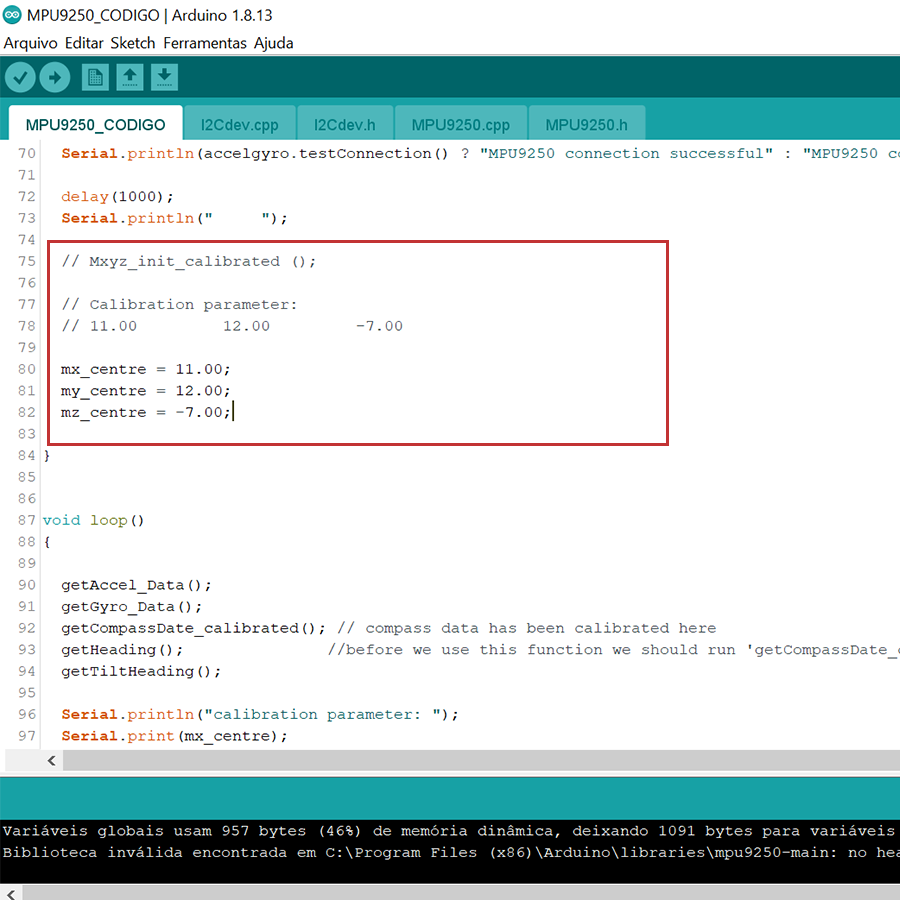
Com o código já aberto, verifique se a função “Mxyz_init_calibrated ( )” está ativa para se iniciar o processo de calibração.
Sugestão: adquira um cabo USB com um tamanho suficiente para permitir diversos giros, um cabo de uma impressora atende muito bem.
Então, carregue o código no Arduino, verifique a velocidade no Monitor Serial e aguarde o reconhecimento do sensor.
#include "Wire.h" // I2Cdev and MPU9250 must be installed as libraries, or else the .cpp/.h files // for both classes must be in the include path of your project #include "I2Cdev.h" #include "MPU9250.h" // class default I2C address is 0x68 // specific I2C addresses may be passed as a parameter here // AD0 low = 0x68 (default for InvenSense evaluation board) // AD0 high = 0x69 MPU9250 accelgyro; I2Cdev I2C_M; uint8_t buffer_m[6]; int16_t ax, ay, az; int16_t gx, gy, gz; int16_t mx, my, mz; float heading; float tiltheading; float Axyz[3]; float Gxyz[3]; float Mxyz[3]; #define sample_num_mdate 5000 volatile float mx_sample[3]; volatile float my_sample[3]; volatile float mz_sample[3]; static float mx_centre = 0; static float my_centre = 0; static float mz_centre = 0; volatile int mx_max = 0; volatile int my_max = 0; volatile int mz_max = 0; volatile int mx_min = 0; volatile int my_min = 0; volatile int mz_min = 0; float temperature; float pressure; float atm; float altitude; void setup() { // join I2C bus (I2Cdev library doesn't do this automatically) Wire.begin(); // initialize serial communication // (38400 chosen because it works as well at 8MHz as it does at 16MHz, but // it's really up to you depending on your project) //Serial.begin(38400); Serial.begin(38400); // initialize device Serial.println("Initializing I2C devices..."); accelgyro.initialize(); // verify connection Serial.println("Testing device connections..."); Serial.println(accelgyro.testConnection() ? "MPU9250 connection successful" : "MPU9250 connection failed"); delay(1000); Serial.println(" "); // Mxyz_init_calibrated (); // Calibration parameter: // 11.00 12.00 -7.00 mx_centre = 11.00; my_centre = 12.00; mz_centre = -7.00; } void loop() { getAccel_Data(); getGyro_Data(); getCompassDate_calibrated(); // compass data has been calibrated here getHeading(); //before we use this function we should run 'getCompassDate_calibrated()' frist, so that we can get calibrated data ,then we can get correct angle . getTiltHeading(); Serial.println("calibration parameter: "); Serial.print(mx_centre); Serial.print(" "); Serial.print(my_centre); Serial.print(" "); Serial.println(mz_centre); Serial.println(" "); Serial.println("Acceleration(g) of X,Y,Z:"); Serial.print(Axyz[0]); Serial.print(","); Serial.print(Axyz[1]); Serial.print(","); Serial.println(Axyz[2]); Serial.println("Gyro(degress/s) of X,Y,Z:"); Serial.print(Gxyz[0]); Serial.print(","); Serial.print(Gxyz[1]); Serial.print(","); Serial.println(Gxyz[2]); Serial.println("Compass Value of X,Y,Z:"); Serial.print(Mxyz[0]); Serial.print(","); Serial.print(Mxyz[1]); Serial.print(","); Serial.println(Mxyz[2]); Serial.println("The clockwise angle between the magnetic north and X-Axis:"); Serial.print(heading); Serial.println(" "); Serial.println("The clockwise angle between the magnetic north and the projection of the positive X-Axis in the horizontal plane:"); Serial.println(tiltheading); Serial.println(" "); Serial.println(); delay(1000); } void getHeading(void) { heading = 180 * atan2(Mxyz[1], Mxyz[0]) / PI; if (heading < 0) heading += 360; } void getTiltHeading(void) { float pitch = asin(-Axyz[0]); float roll = asin(Axyz[1] / cos(pitch)); float xh = Mxyz[0] * cos(pitch) + Mxyz[2] * sin(pitch); float yh = Mxyz[0] * sin(roll) * sin(pitch) + Mxyz[1] * cos(roll) - Mxyz[2] * sin(roll) * cos(pitch); float zh = -Mxyz[0] * cos(roll) * sin(pitch) + Mxyz[1] * sin(roll) + Mxyz[2] * cos(roll) * cos(pitch); tiltheading = 180 * atan2(yh, xh) / PI; if (yh < 0) tiltheading += 360; } void Mxyz_init_calibrated () { Serial.println(F("Before using 9DOF,we need to calibrate the compass frist,It will takes about 2 minutes.")); Serial.print(" "); Serial.println(F("During calibratting ,you should rotate and turn the 9DOF all the time within 2 minutes.")); Serial.print(" "); Serial.println(F("If you are ready ,please sent a command data 'ready' to start sample and calibrate.")); while (!Serial.find("ready")); Serial.println(" "); Serial.println("ready"); Serial.println("Sample starting......"); Serial.println("waiting ......"); get_calibration_Data (); Serial.println(" "); Serial.println("compass calibration parameter "); Serial.print(mx_centre); Serial.print(" "); Serial.print(my_centre); Serial.print(" "); Serial.println(mz_centre); Serial.println(" "); } void get_calibration_Data () { for (int i = 0; i < sample_num_mdate; i++) { get_one_sample_date_mxyz(); /* Serial.print(mx_sample[2]); Serial.print(" "); Serial.print(my_sample[2]); //you can see the sample data here . Serial.print(" "); Serial.println(mz_sample[2]); */ if (mx_sample[2] >= mx_sample[1])mx_sample[1] = mx_sample[2]; if (my_sample[2] >= my_sample[1])my_sample[1] = my_sample[2]; //find max value if (mz_sample[2] >= mz_sample[1])mz_sample[1] = mz_sample[2]; if (mx_sample[2] <= mx_sample[0])mx_sample[0] = mx_sample[2]; if (my_sample[2] <= my_sample[0])my_sample[0] = my_sample[2]; //find min value if (mz_sample[2] <= mz_sample[0])mz_sample[0] = mz_sample[2]; } mx_max = mx_sample[1]; my_max = my_sample[1]; mz_max = mz_sample[1]; mx_min = mx_sample[0]; my_min = my_sample[0]; mz_min = mz_sample[0]; mx_centre = (mx_max + mx_min) / 2; my_centre = (my_max + my_min) / 2; mz_centre = (mz_max + mz_min) / 2; } void get_one_sample_date_mxyz() { getCompass_Data(); mx_sample[2] = Mxyz[0]; my_sample[2] = Mxyz[1]; mz_sample[2] = Mxyz[2]; } void getAccel_Data(void) { accelgyro.getMotion9(&ax, &ay, &az, &gx, &gy, &gz, &mx, &my, &mz); Axyz[0] = (double) ax / 16384; Axyz[1] = (double) ay / 16384; Axyz[2] = (double) az / 16384; } void getGyro_Data(void) { accelgyro.getMotion9(&ax, &ay, &az, &gx, &gy, &gz, &mx, &my, &mz); Gxyz[0] = (double) gx * 250 / 32768; Gxyz[1] = (double) gy * 250 / 32768; Gxyz[2] = (double) gz * 250 / 32768; } void getCompass_Data(void) { I2C_M.writeByte(MPU9150_RA_MAG_ADDRESS, 0x0A, 0x01); //enable the magnetometer delay(10); I2C_M.readBytes(MPU9150_RA_MAG_ADDRESS, MPU9150_RA_MAG_XOUT_L, 6, buffer_m); mx = ((int16_t)(buffer_m[1]) << 8) | buffer_m[0] ; my = ((int16_t)(buffer_m[3]) << 8) | buffer_m[2] ; mz = ((int16_t)(buffer_m[5]) << 8) | buffer_m[4] ; Mxyz[0] = (double) mx * 1200 / 4096; Mxyz[1] = (double) my * 1200 / 4096; Mxyz[2] = (double) mz * 1200 / 4096; } void getCompassDate_calibrated () { getCompass_Data(); Mxyz[0] = Mxyz[0] - mx_centre; Mxyz[1] = Mxyz[1] - my_centre; Mxyz[2] = Mxyz[2] - mz_centre; }
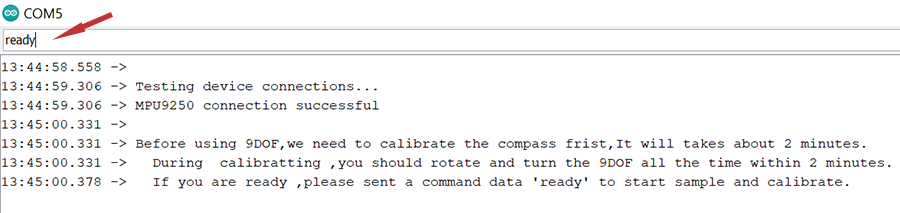
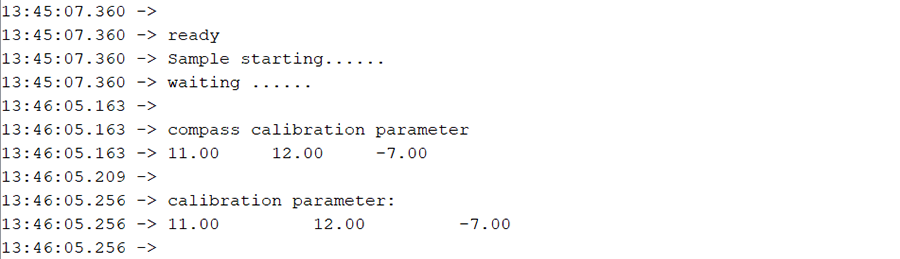
Feito isso, execute o comando “ready”, gire e movimente o sensor até aparecer os parâmetros de calibração.
Funcionamento do MPU9250-BMP280
Então, copie parâmetros obtidos anteriormente e insira no código com as alterações.
Agora, carregue o código novamente e abra o Monitor Serial.

Vejam os valores apresentados do acelerômetro, giroscópio, magnetômetro e também da proa e da inclinação da proa em relação ao eixo X.
Então, percebe-se que com esse código é possível criar uma grande gama de projetos.
Aplicação com BMP280
Nesse sensor está incluído um barômetro BMP280 que com a aplicação a seguir será possível observar o seu funcionamento.
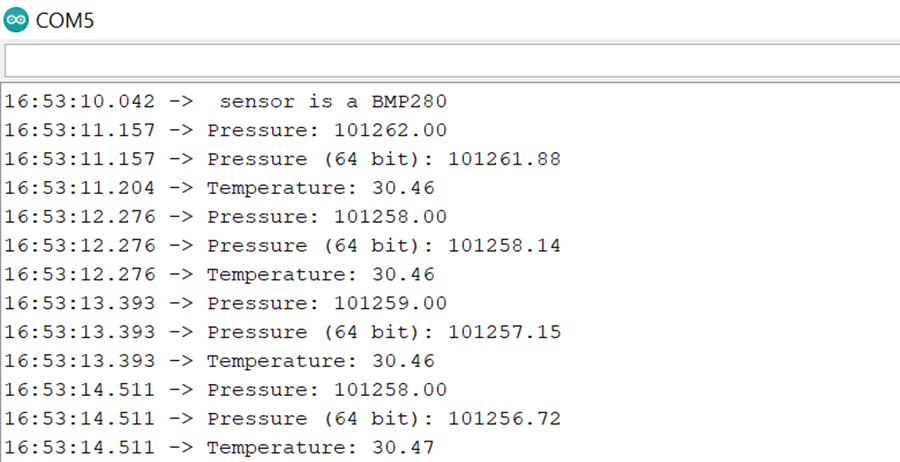
Então, inclua a biblioteca BMx280I2C.h e carregue o código.
// BMx280_I2C.ino // // shows how to use the BMP280 / BMx280 library with the sensor connected using I2C. // // Copyright (c) 2018 Gregor Christandl // // connect the AS3935 to the Arduino like this: // // Arduino - BMP280 / BME280 // 3.3V ---- VCC // GND ----- GND // SDA ----- SDA // SCL ----- SCL // some BMP280/BME280 modules break out the CSB and SDO pins as well: // 5V ------ CSB (enables the I2C interface) // GND ----- SDO (I2C Address 0x76) // 5V ------ SDO (I2C Address 0x77) // other pins can be left unconnected. #include <Arduino.h> #include <Wire.h> #include <BMx280I2C.h> #define I2C_ADDRESS 0x76 //create a BMx280I2C object using the I2C interface with I2C Address 0x76 BMx280I2C bmx280(I2C_ADDRESS); void setup() { // put your setup code here, to run once: Serial.begin(38400); //wait for serial connection to open (only necessary on some boards) while (!Serial); Wire.begin(); //begin() checks the Interface, reads the sensor ID (to differentiate between BMP280 and BME280) //and reads compensation parameters. if (!bmx280.begin()) { Serial.println("begin() failed. check your BMx280 Interface and I2C Address."); while (1); } if (bmx280.isBME280()) Serial.println("sensor is a BME280"); else Serial.println("sensor is a BMP280"); //reset sensor to default parameters. bmx280.resetToDefaults(); //by default sensing is disabled and must be enabled by setting a non-zero //oversampling setting. //set an oversampling setting for pressure and temperature measurements. bmx280.writeOversamplingPressure(BMx280MI::OSRS_P_x16); bmx280.writeOversamplingTemperature(BMx280MI::OSRS_T_x16); //if sensor is a BME280, set an oversampling setting for humidity measurements. if (bmx280.isBME280()) bmx280.writeOversamplingHumidity(BMx280MI::OSRS_H_x16); } void loop() { // put your main code here, to run repeatedly: delay(1000); //start a measurement if (!bmx280.measure()) { Serial.println("could not start measurement, is a measurement already running?"); return; } //wait for the measurement to finish do { delay(100); } while (!bmx280.hasValue()); Serial.print("Pressure: "); Serial.println(bmx280.getPressure()); Serial.print("Pressure (64 bit): "); Serial.println(bmx280.getPressure64()); Serial.print("Temperature: "); Serial.println(bmx280.getTemperature()); //important: measurement data is read from the sensor in function hasValue() only. //make sure to call get*() functions only after hasValue() has returned true. if (bmx280.isBME280()) { Serial.print("Humidity: "); Serial.println(bmx280.getHumidity()); } }
Então, abra o Monitor Serial e observe as leituras da temperatura e pressão atmosférica.